

Artist's conception of the Curiosity rover vaporizing rock on Mars. The rover landed on Mars in August 2012.
A Mars rover is an automated motor vehicle that propels itself across the surface of the planet Mars upon arrival. Rovers have several advantages over stationary landers: they examine more territory, and they can be directed to interesting features, they can place themselves in sunny positions to weather winter months, and they can advance the knowledge of how to perform very remote robotic vehicle control.
There have been four successful robotically operated Mars rovers. The Jet Propulsion Laboratory managed the Mars Pathfinder mission and its now inactive Sojourner rover. It currently manages the Mars Exploration Rover mission's active Opportunity rover and inactive Spirit, and, as part of the Mars Science Laboratory mission, the Curiosity rover. On January 24, 2014, NASA reported that current studies on the planet Mars by the Curiosity and Opportunity rovers will now be searching for evidence of ancient life, including a biosphere based on autotrophic, chemotrophic, and/or chemolithoautotrophic microorganisms, as well as ancient water, including fluvio-lacustrine environments (plains related to ancient rivers or lakes) that may have been habitable.[1][2][3][4] The search for evidence of habitability, taphonomy (related to fossils), and organic carbon on the planet Mars is now a primary NASA objective.[1]
Synopsis[]


Comparison of distances driven by various wheeled vehicles on the surface of Earth's moon and Mars.
Several rovers have been sent to Mars:
- Template:Flagicon image Mars 2, Prop-M rover, 1971, Mars 2 landing failed taking Prop-M with it. The Mars 2 and 3 spacecraft from the USSR had identical 4.5 kg Prop-M rovers. They were to move on skis while connected to the landers with cables.[5]
- Template:Flagicon image Mars 3, Prop-M rover, 1971, lost when Mars 3 lander stopped communicating about 20 seconds after landing.[5]
- Template:Flagicon image Sojourner rover, Mars Pathfinder, landed successfully on July 4, 1997. Communications were lost on September 27, 1997.
- Template:Flagicon image Beagle 2, Planetary Undersurface Tool, lost with Beagle 2 on deployment from Mars Express in 2003.[6] A compressed spring mechanism was designed to allow movement across the surface at a rate of 1 cm per 5 seconds[6] and to burrow into the ground and collect a subsurface sample in a cavity in its tip.
- Template:Flagicon image Spirit (MER-A), Mars Exploration Rover, launched on June 10, 2003 at 13:58:47 EDT[7] and landed successfully on January 4, 2004. Nearly 6 years after the original mission limit, Spirit had covered a total distance of 7.73 km (Template:Convert/round mi) but its wheels became trapped in sand.[8] Around January 26, 2010, NASA conceded defeat in its efforts to free the rover and stated that it would now function as a stationary science platform.[9] The last communication received from the rover was on March 22, 2010, and NASA ceased attempts to re-establish communication on May 25, 2011.[10]
- Template:Flagicon image Opportunity (MER-B), Mars Exploration Rover, launched on July 7, 2003 at 23:18:15 EDT[7] and landed successfully on January 25, 2004. Opportunity surpassed the previous record for longevity of a surface mission to Mars as of May 20, 2010 and surpassed the previous record for distance traveled off-Earth as of July 28, 2014 by covering a total distance of 40.25 km (Template:Convert/round mi).[11][12][13][14] Opportunity is still operational and mobile as of April 19, 2024.
- Template:Flagicon image Curiosity, Mars Science Laboratory (MSL), by NASA, was launched November 26, 2011 at 10:02 EST[15][16] and landed in the Aeolis Palus plain near Aeolis Mons (informally "Mount Sharp")[17][18][19][20] in Gale Crater on August 6, 2012, 05:31 UTC.[21][22][23] Curiosity Rover is still operational as of April 19, 2024.
Locations of Mars rovers, in context[]
Template:Mars map indicating landers
Concepts[]
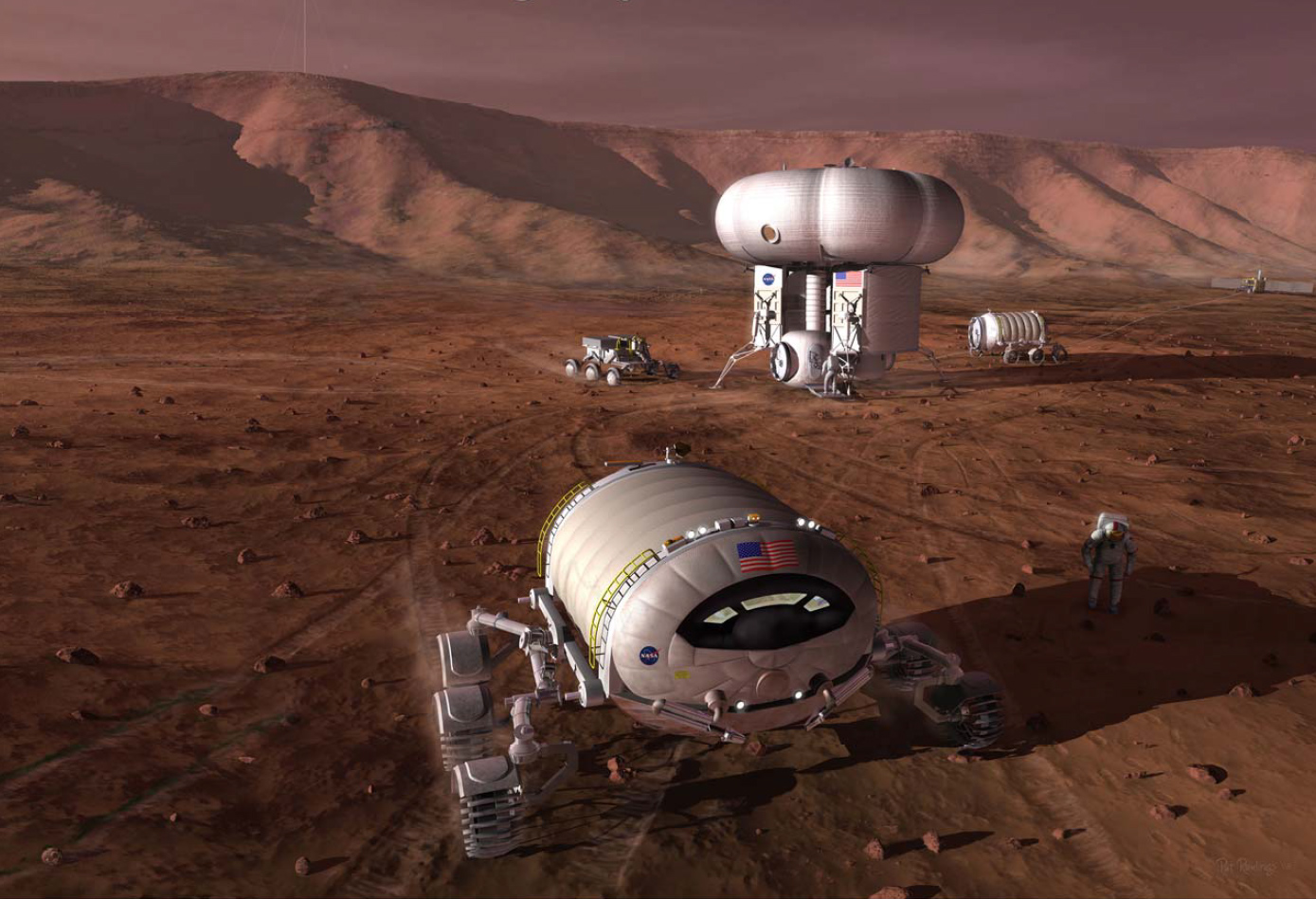

DRMA 5.0 "commuter" Mars base, Chemical Propulsion Option (2009)
Mars rovers in development include:
- ExoMars, by the ESA. Planned Mars launch 2018.[24] The rover will use stained glass to prevent UV from changing image colors, allowing for true color images of the surface of Mars.[25]
- Chinese Mars Rover, has been planned for a pre-2020 launch, as part of a sample-return mission.[26]
- MESR (Mars Exploration Science Rover), REX (Robot EXplorer), and MRPTA (Micro-Rover Platform with Tooling Arm) have a target destination of Mars, planned by the Canadian Space Agency (CSA).[27]
- Mars 2020, a NASA rover based on the current rover Curiosity and planned to launch in 2020.
- 2020 Chinese Mars Mission, would include an orbiter, lander and small rover.
One experimental design, not proposed for any actual mission, is:
- Mars Tumbleweed Rover, a wind-propelled rover.[28]
Many Mars Design Reference Mission include rovers as do some Mars sample return (see MAX-C)
Goals[]
NASA distinguishes between "mission" objectives and "science" objectives. Mission objectives are related to progress in space technology and development processes. Science objectives are met by the instruments during their mission in space.
The details of rover science vary according to equipment carried. The primary goal of the Spirit and Opportunity rovers is to discover "the history of water on Mars".[29] (The presence of usable water would greatly reduce manned mission cost.)
The four science goals of NASA's long-term Mars Exploration Program are:
- Determine whether life ever arose on Mars
- Characterize the climate of Mars
- Characterize the geology of Mars
- Prepare for human exploration of Mars[30]

Gallery[]
")
")
")
")
")
")
See also[]
- Astrobiology
- Comparison of embedded computer systems on board the Mars rovers
- Curiosity rover
- ExoMars Lander
- InSight lander
- List of artificial objects on Mars
- Manned exploration robots
- Manned Mars rover
- Mars Exploration Rover
- Mars-Grunt
- Mars Pathfinder
- Mars Reconnaissance Orbiter
- Mars 2020 rover mission
- Odyssey orbiter
- Opportunity rover
- Radiation hardening
- Scientific information from the Mars Exploration Rover mission
- Sojourner rover
- Spirit rover
References[]
- ↑ 1.0 1.1 Template:Cite journal
- ↑ Template:Cite journal
- ↑ Template:Cite journal
- ↑ Template:Cite journal
- ↑ 5.0 5.1 "Mars 2 Lander". NASA NSSDC. http://nssdc.gsfc.nasa.gov/nmc/masterCatalog.do?sc=1971-045D. Retrieved 2008-06-25.
- ↑ 6.0 6.1 NSSDC – Beagle 2. NASA
- ↑ 7.0 7.1 "Mars Exploration". 10 August 2012. http://marsrovers.jpl.nasa.gov/mission/launch_e.html. Retrieved 2012-08-10.
- ↑ Template:Cite news
- ↑ Template:Cite news
- ↑ Template:Cite news
- ↑ Template:Cite news
- ↑ 'Greeley Haven' is Winter Workplace for Mars Rover
- ↑ Webster, Guy; Brown, Dwayne (July 28, 2014). "NASA Long-Lived Mars Opportunity Rover Sets Off-World Driving Record". NASA. http://www.jpl.nasa.gov/news/news.php?release=2014-245. Retrieved July 29, 2014.
- ↑ Knapp, Alex (July 29, 2014). "NASA's Opportunity Rover Sets A Record For Off-World Driving". Forbes. http://www.forbes.com/sites/alexknapp/2014/07/29/nasas-opportunity-rover-sets-a-record-for-off-world-driving. Retrieved July 29, 2014.
- ↑ "Mars Science Laboratory Launch". 26 November 2011. http://www.nasa.gov/mission_pages/msl/launch/index.html. Retrieved 2011-11-26.
- ↑ Associated Press (26 November 2011). "NASA Launches Super-Size Rover to Mars: 'Go, Go!'". New York Times. http://www.nytimes.com/aponline/2011/11/26/science/AP-US-SCI-Mars-Rover.html. Retrieved 2011-11-26.
- ↑ USGS (16 May 2012). "Three New Names Approved for Features on Mars". USGS. http://astrogeology.usgs.gov/HotTopics/index.php?/archives/447-Three-New-Names-Approved-for-Features-on-Mars.html. Retrieved 28 May 2012.
- ↑ NASA Staff (27 March 2012). "'Mount Sharp' on Mars Compared to Three Big Mountains on Earth". NASA. http://www.nasa.gov/mission_pages/msl/multimedia/pia15292-Fig2.html. Retrieved 31 March 2012.
- ↑ Agle, D. C. (28 March 2012). "'Mount Sharp' On Mars Links Geology's Past and Future". NASA. http://www.nasa.gov/mission_pages/msl/news/msl20120328.html. Retrieved 31 March 2012.
- ↑ Staff (29 March 2012). "NASA's New Mars Rover Will Explore Towering 'Mount Sharp'". Space.com. http://www.space.com/15097-mars-mountain-sharp-curiosity-rover.html. Retrieved 30 March 2012.
- ↑ Webster, Guy; Brown, Dwayne (22 July 2011). "NASA's Next Mars Rover To Land At Gale Crater". NASA JPL. http://www.jpl.nasa.gov/news/news.cfm?release=2011-222#1. Retrieved 2011-07-22.
- ↑ Chow, Dennis (22 July 2011). "NASA's Next Mars Rover to Land at Huge Gale Crater". Space.com. http://www.space.com/12394-nasa-mars-rover-landing-site-unveiled.html. Retrieved 2011-07-22.
- ↑ Template:Cite news
- ↑ Template:Cite news
- ↑ ELLIE ZOLFAGHARIFARD (15 October 2013). "How medieval stained-glass is creating the ultimate SPACE camera: Nanoparticles used in church windows will help scientists see Mars' true colours under extreme UV light". http://www.dailymail.co.uk/sciencetech/article-2461418/How-medieval-stained-glass-creating-ultimate-SPACE-camera-Nanoparticles-used-church-windows-help-scientists-Mars-true-colours-extreme-UV-light.html.
- ↑ Template:Cite news
- ↑ "The Canadian Space Agency's Fleet of Rovers". Canadian Space Agency. http://www.asc-csa.gc.ca/eng/rovers/default.asp. Retrieved 2014-09-28.
- ↑ Template:Cite news
- ↑ "Mars Exploration Rover Mission: Overview". marsrovers.nasa.gov. http://marsrovers.nasa.gov/overview/. Retrieved 2008-06-25.
- ↑ "Mars Exploration Rover Mission: Science – Looking for signs of past water on Mars". marsrovers.nasa.gov. http://marsrovers.nasa.gov/science/. Retrieved 2008-06-25.
External links[]
| |||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||||||||



.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| This page uses Creative Commons Licensed content from Wikipedia (view authors). | 
|